# code adapted from Dagan Martinez's work
# https://github.com/Property404/lionchief-controller
# sensor code by Joseph Rampolla
import RPi.GPIO as GPIO
import time
GPIO.setwarnings(False)
import RPi.GPIO as GPIO
from time import sleep
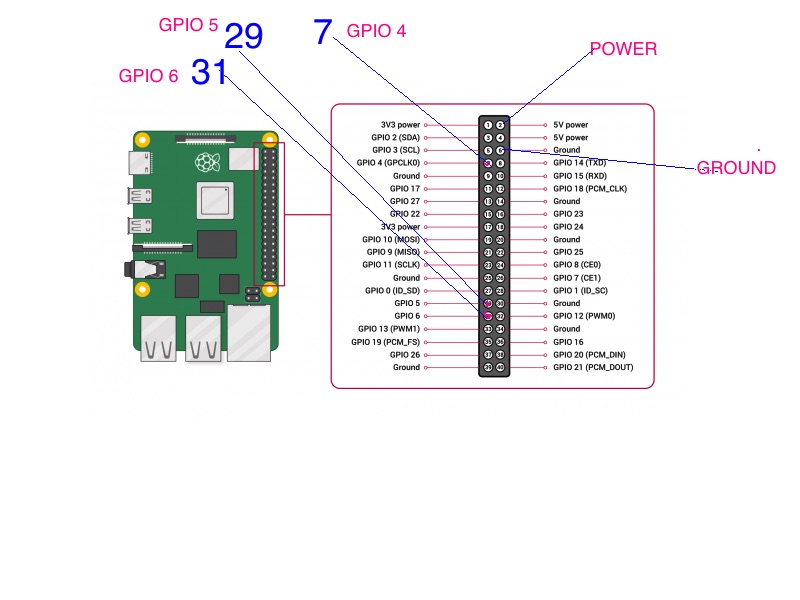
GPIO.setmode(GPIO.BOARD) #uses board numbering
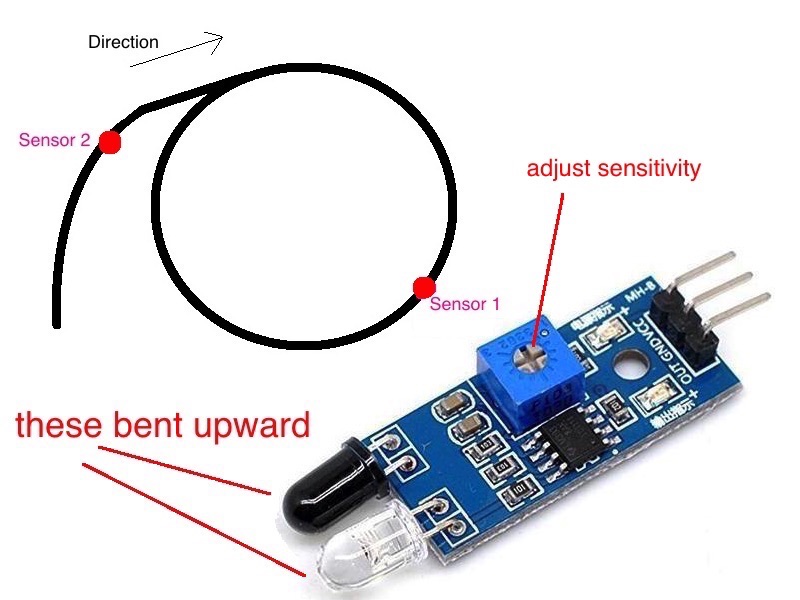
GPIO.setup(29, GPIO.IN, pull_up_down=GPIO.PUD_UP) # GPIO 5 sensor 2
GPIO.setup(31, GPIO.IN, pull_up_down=GPIO.PUD_UP) # GPIO 6 sensor 1
GPIO.setup(7, GPIO.OUT) # GPIO 4 for relay trigger turnout
from lc import LionChief
import time
chief = LionChief("44:A6:E5:3E:79:45")
chief.set_bell_pitch(1)
chief.speak()
time.sleep(3.5)
# Gradually start or stop
def ramp(start_speed, end_speed):
speed = start_speed
while speed != end_speed:
chief.set_speed(speed)
if speed > end_speed:
speed -= 1
else:
speed += 1
time.sleep(.2)
chief.set_speed(end_speed)
while True:
# Time to go
chief.set_horn(True)
time.sleep(0.75)
chief.set_horn(False)
chief.set_reverse(False)
ramp(0, 12)
time.sleep(15) #change number to desired delay
while True:
if GPIO.input(31) == GPIO.LOW: # waits for sensor 1 to trigger
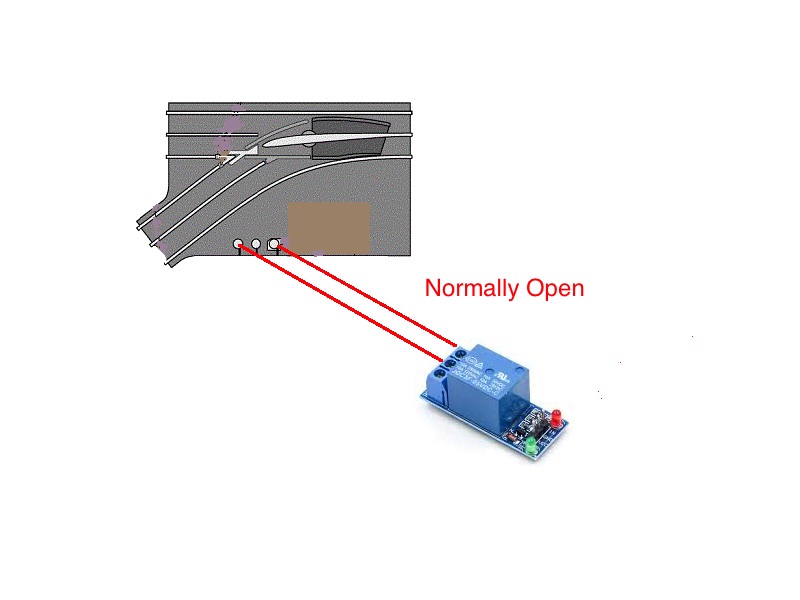
# relay for O27 turnout
GPIO.output(7, 1) # set GPIO24 to 1/GPIO.HIGH/True -- throws turnout
sleep(0.5) # wait half a second
GPIO.output(7, 0) # set GPIO24 to 0/GPIO.LOW/False
sleep(0.5) # wait half a second
break
chief.set_reverse(True)
ramp(0,8)
chief.set_horn(True)
time.sleep(0.75)
chief.set_horn(False)
while True:
if GPIO.input(29) == GPIO.LOW: # waits for sensor 2 to trigger
break
# This is our stop
chief.set_bell(True)
time.sleep(1)
ramp(6,0)
time.sleep(.1)
chief.set_bell(False)
time.sleep(18)
GPIO.cleanup
The site owner is not and cannot be held liable for fire, electrical shock, property damage, bodily injury, loss of life, or accident of any kind caused by electrical circuits or any ideas, projects, techniques, or information contained on this site.
The visitor assumes all risk and responsibility for any loss, injury, accident or damage arising from the use of information, ideas, techniques, projects, concepts, components, products, and circuits on this site.
Please refer to hobby reference materials for correct and safe use information
regarding these and all electronic circuits. These diagrams are intended to explain how things were accomplished in theory, but it is the
responsibility of the individual to locate precise information regarding electrical circuits, materials, ratings of components, etc. Do not attempt
these hobby projects, or any electrical project, if you don't have the necessary skills and experience.